MediaPipeによるお手軽手認識とリアルタイムおもちゃのためのOSC連携
MediaPipeはBazarevskyらがCVPR2019で発表したオープンソースの機械学習用フレームワークです。
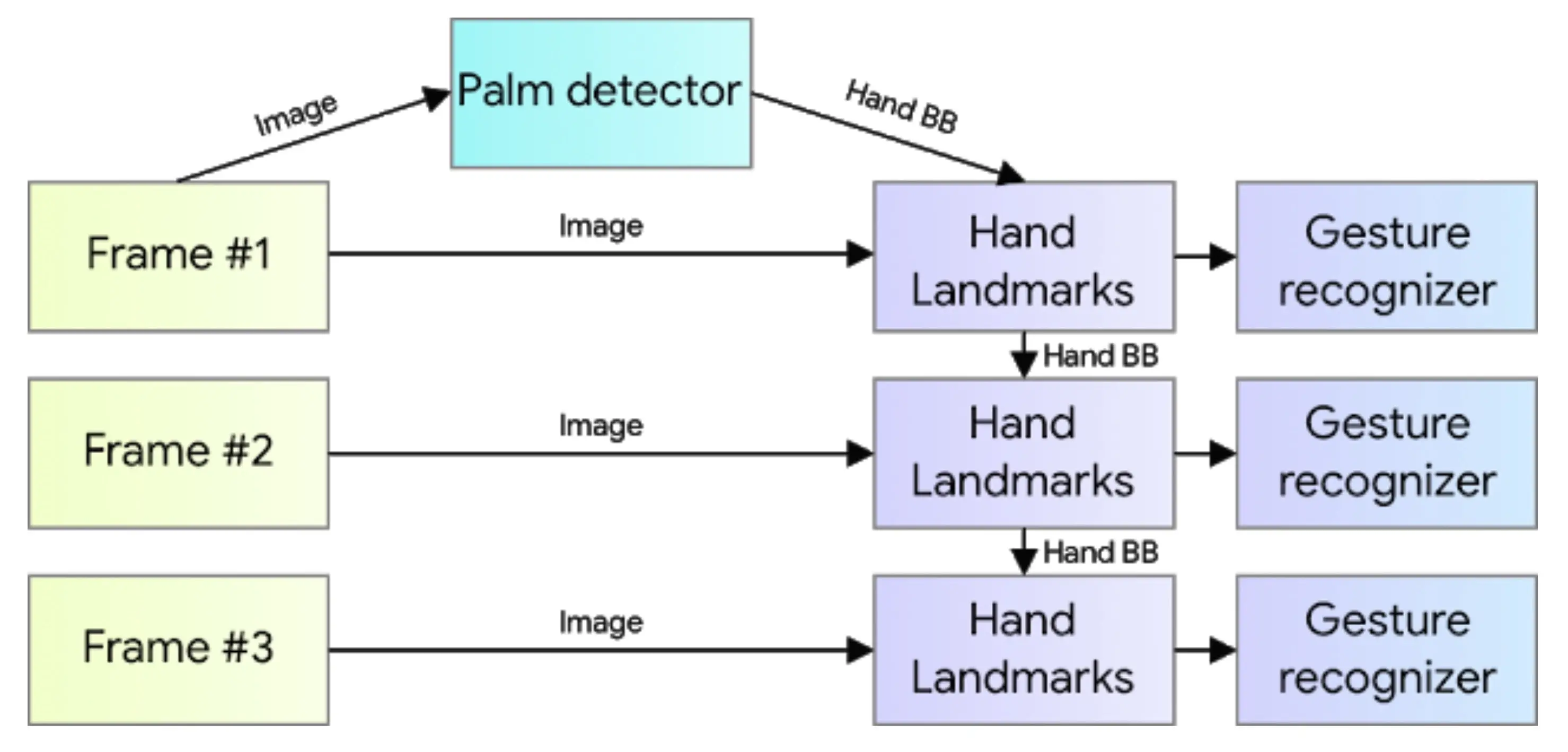
https://github.com/google/mediapipeそこで用いられている手認識機能は,single-shot手のひら認識アルゴリズムとlandmark認識モデルが組み合わされたものです(Google AI Blog: On-Device, Real-Time Hand Tracking with MediaPipe)
手の形状は以下の各ランドマークの座標として取得できます.毎フレーム推論が走り,cv座標での値が取得できます.
https://google.github.io/mediapipe/solutions/hands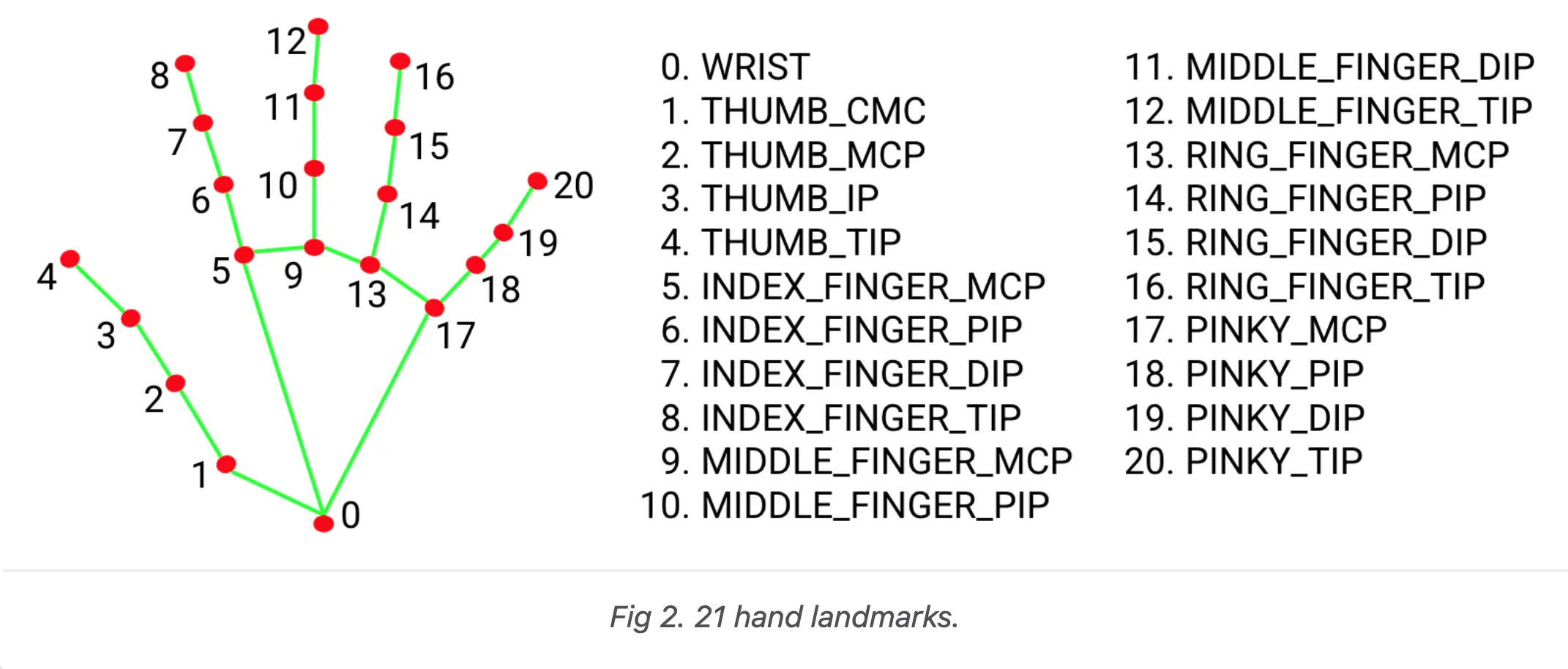
返ってくるlandmarkのオブジェクトは以下のようにして座標のfloatが取り出せます
1for hand_idx, landmarks in enumerate(multi_hand_landmarks): 2 for point_idx, points in enumerate(landmarks.landmark): 3 print(f"Hand: {hand_idx}, {HAND_LANDMARK_NAMES[point_idx]}," 4 + f"x:{points.x} y:{points.y} z:{points.z}")
この時のHAND_LANDMARK_NAMESは,以下のような順番になっています.
1HAND_LANDMARK_NAMES = [ 2 "wrist", 3 "thumb_1", 4 "thumb_2", 5 "thumb_3", 6 "thumb_4", 7 "index_1", 8 "index_2", 9 "index_3", 10 "index_4", 11 "middle_1", 12 "middle_2", 13 "middle_3", 14 "middle_4", 15 "ring_1", 16 "ring_2", 17 "ring_3", 18 "ring_4", 19 "pinky_1", 20 "pinky_2", 21 "pinky_3", 22 "pinky_4" 23]
今回はこのMediaPipeによるリアルタイム手認識を用いて何かしらのインタラクティブ作品やWekinator等を用いるジェスチャ認識などのためのOpen Sound Controlでのデータ送信をプロトタイプします.
スクリプト
1# Atsuya Kobayashi 2020-12-22 2# Reference: https://google.github.io/mediapipe/solutions/hands 3# LICENCE: MIT 4 5from itertools import chain 6 7import mediapipe as mp 8from cv2 import cv2 9from pythonosc import udp_client 10 11IP = "127.0.0.1" 12PORT = 7474 13VIDEO_DEVICE_ID = 0 14RELATIVE_AXIS_MODE = True 15 16HAND_LANDMARK_NAMES = [ 17 "wrist", 18 "thumb_1", 19 "thumb_2", 20 "thumb_3", 21 "thumb_4", 22 "index_1", 23 "index_2", 24 "index_3", 25 "index_4", 26 "middle_1", 27 "middle_2", 28 "middle_3", 29 "middle_4", 30 "ring_1", 31 "ring_2", 32 "ring_3", 33 "ring_4", 34 "pinky_1", 35 "pinky_2", 36 "pinky_3", 37 "pinky_4" 38] 39 40 41def extract_detected_hands_points(multi_hand_landmarks, 42 send_osc_client=None): 43 44 if multi_hand_landmarks is not None: 45 for hand_idx, landmarks in enumerate(multi_hand_landmarks): 46 for point_idx, points in enumerate(landmarks.landmark): 47 48 # if you want to check data on console 49 print(f"Hand: {hand_idx}, {HAND_LANDMARK_NAMES[point_idx]}," 50 + f"x:{points.x} y:{points.y} z:{points.z}") 51 """ 52 if you want to send data to addresses correspoding 53 to landmarks names on detected hands, use berow 54 """ 55 # if send_osc_client is not None: 56 # send_osc_client.send_message(f"/{HAND_LANDMARK_NAMES[point_idx]}", 57 # [points.x, points.y]) 58 59 """if you want to send data to single input address, use berow""" 60 if send_osc_client is not None: 61 send_osc_client.send_message( 62 f"/YOUR_OSC_ADDRESS", 63 list(chain.from_iterable([[p.x, p.y] for p in landmarks.landmark]))) 64 65 66if __name__ == "__main__": 67 68 mp_drawing = mp.solutions.drawing_utils 69 mp_hands = mp.solutions.hands 70 71 hands = mp_hands.Hands( 72 min_detection_confidence=0.5, min_tracking_confidence=0.5) 73 74 cap = cv2.VideoCapture(VIDEO_DEVICE_ID) 75 76 osc_client = udp_client.SimpleUDPClient(IP, PORT) 77 78 while cap.isOpened(): 79 success, image = cap.read() 80 if not success: 81 print("Ignoring empty camera frame.") 82 # If loading a video, use 'break' instead of 'continue'. 83 continue 84 85 image = cv2.cvtColor(cv2.flip(image, 1), cv2.COLOR_BGR2RGB) 86 image.flags.writeable = False 87 results = hands.process(image) 88 extract_detected_hands_points(results.multi_hand_landmarks, 89 send_osc_client=osc_client) 90 image.flags.writeable = True 91 image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR) 92 if results.multi_hand_landmarks: 93 for hand_landmarks in results.multi_hand_landmarks: 94 mp_drawing.draw_landmarks( 95 image, hand_landmarks, mp_hands.HAND_CONNECTIONS) 96 cv2.imshow('Detected Hands', image) 97 98 if cv2.waitKey(5) & 0xFF == 27: 99 break 100 101 hands.close() 102 cap.release()